University Projects
Mobile Robotics
Role- Project Lead Mobile Robotics consists of four students learning modern techniques for robot control. This includes robotic kinematics, data structures, and sensor input. Equipment such as LIDAR, Kinects, and webcams were utilized for localization and path planning. As project lead, I was tasked with directing the group developing broader solutions to the overall problems we were given and ensure that it was possible to integrate every group member's component into a single working set of programs. In addition, I was in charge of the same programming tasks as my groupmates. Code-wise, I was in charge of kinematics, path planning, image processing, and Kinect integration. Through the course of the project we were able to achieve our goal of programming the robot to localize, navigate a series of hallways, and avoid unexpected obstacles along the way.
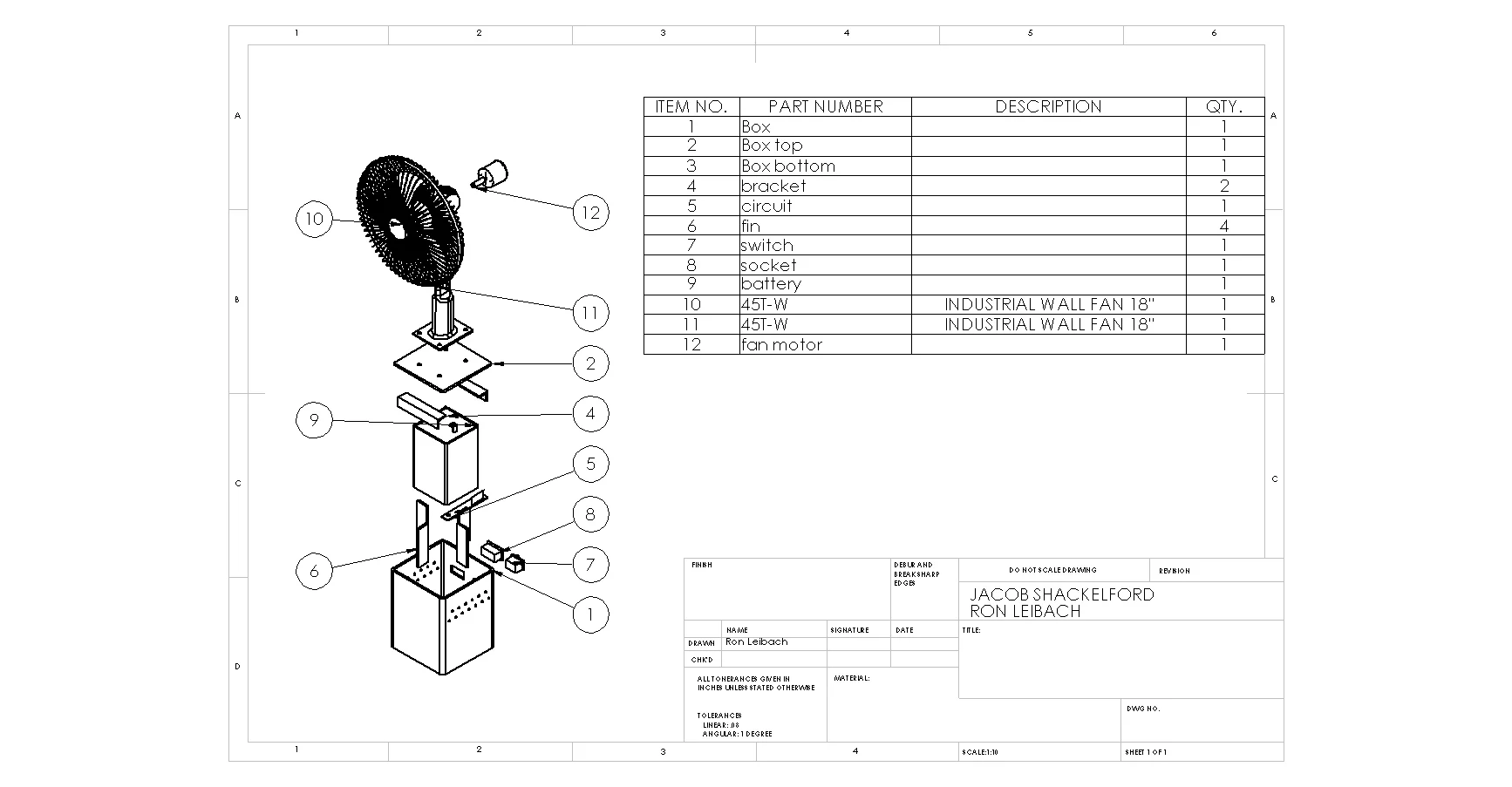
Engineering Design
Role- Design Engineer A colleague and I set out to create something affordable, unique, and beneficial for those who had less fortunate living conditions than we had. We decided to tackle the problem of mosquito net comfortability, as we had read that up to 50% of donated mosquito nets in malaria-stricken areas of sub-Saharan Africa were unused due to the stagnant arid air under the nets. We developed a portable fan with a low cost solar panel that could be charged during the day and used throughout the night that would keep the air under a mosquito net more comfortable. We flow-tested various sets of blades in order to optimize the amount of airflow we could achieve in a small scale wind tunnel. In addition, we created a charging circuit that would keep the battery safe from being overcharged. A prototype was built and was presented at the 2012 American Society of Tropical Medicine and Hygiene conference in Philadelphia.


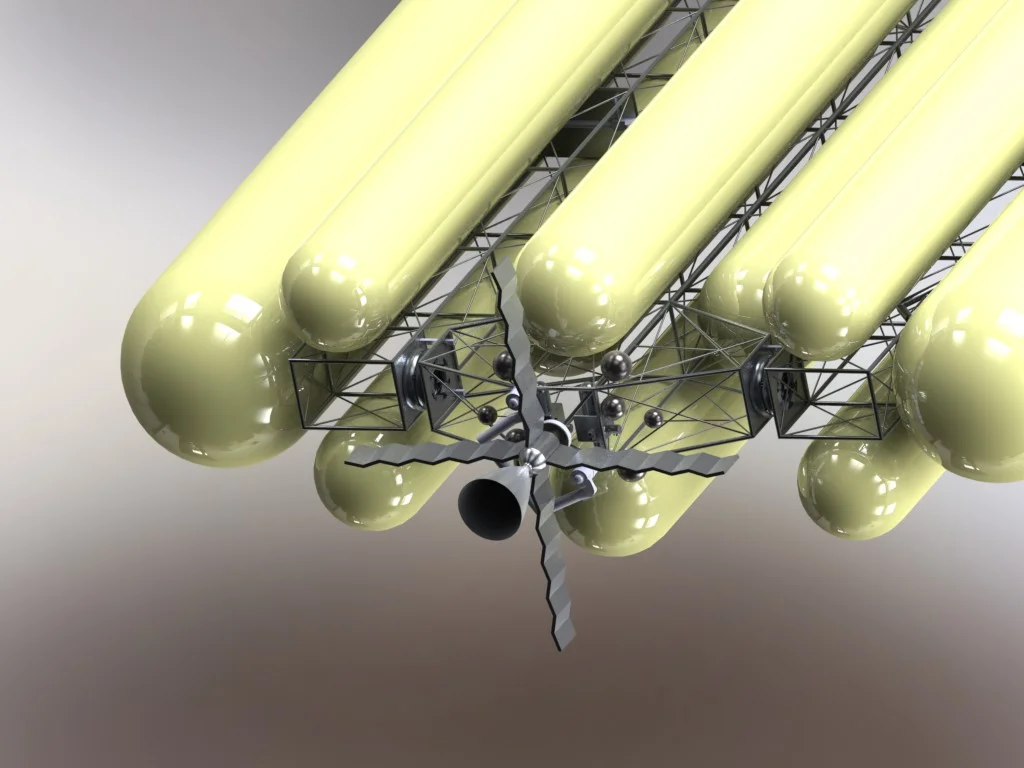
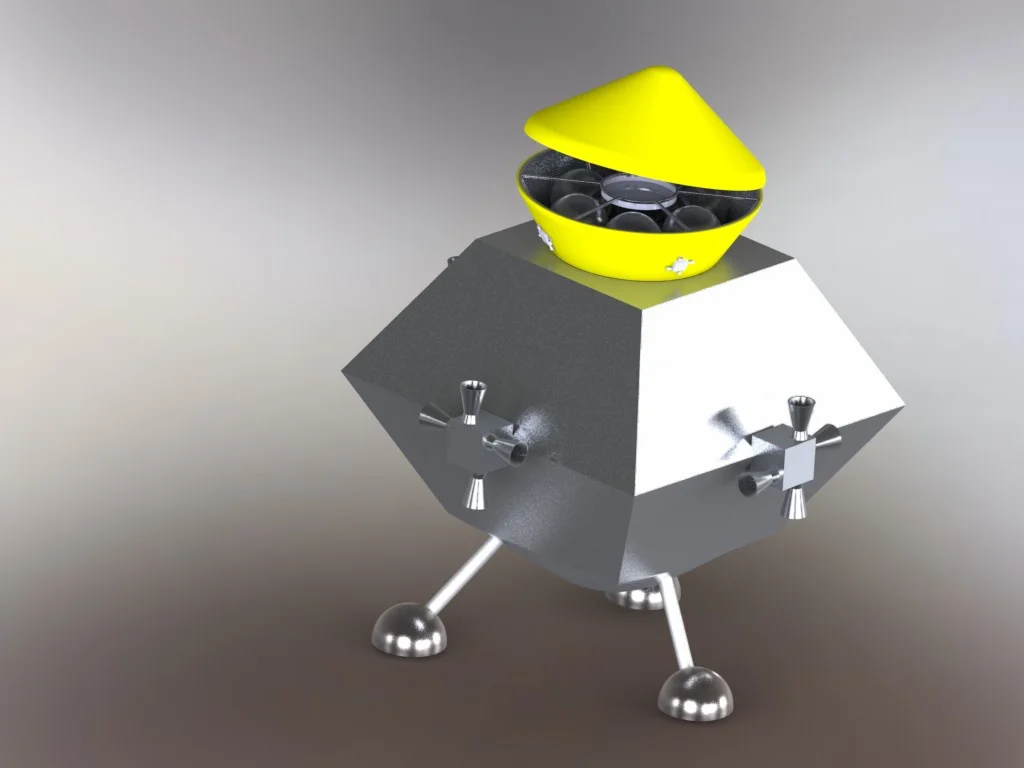
Aerospace Design
Role- Project Lead In the final aerospace course of the undergraduate career, the class is split into teams and compete to organize and design the most feasible and creative mission to complete the given project task. We were given the challenge of landing on an asteroid in near-Earth orbit. As group leader, I was in charge of guiding the direction of the project, ensuring that everybody else's components (including my own) were all inter-compatible, and keeping everybody on the same page creatively. In addition to my role as project lead, I was in charge of asteroid interaction, scientific return, and flight profile. Weekly presentations were given where we opened our projects open to peer review for constructive criticism, in addition to two milestone presentations for a handful of NASA faculty.