Research
TCERA
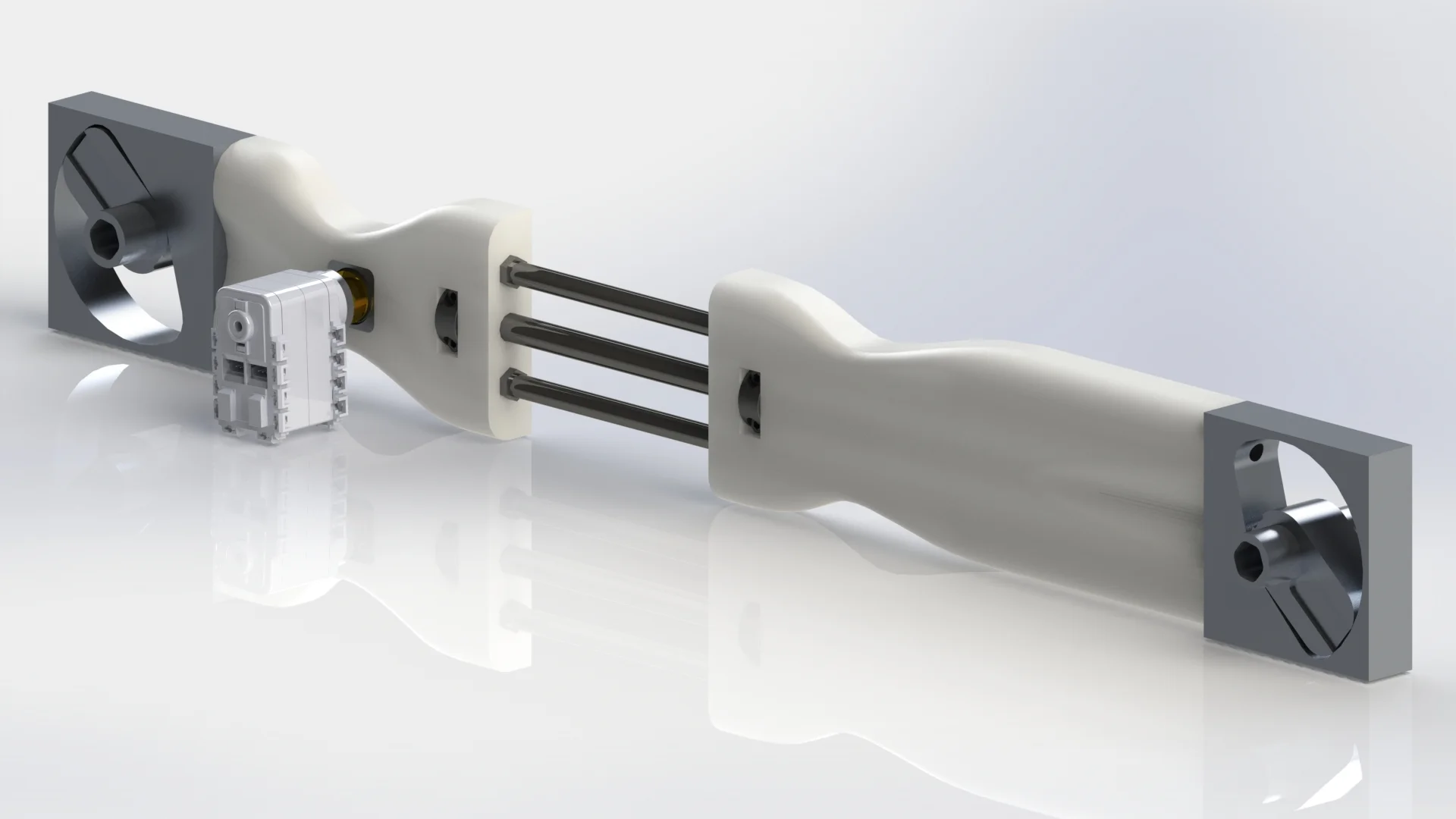
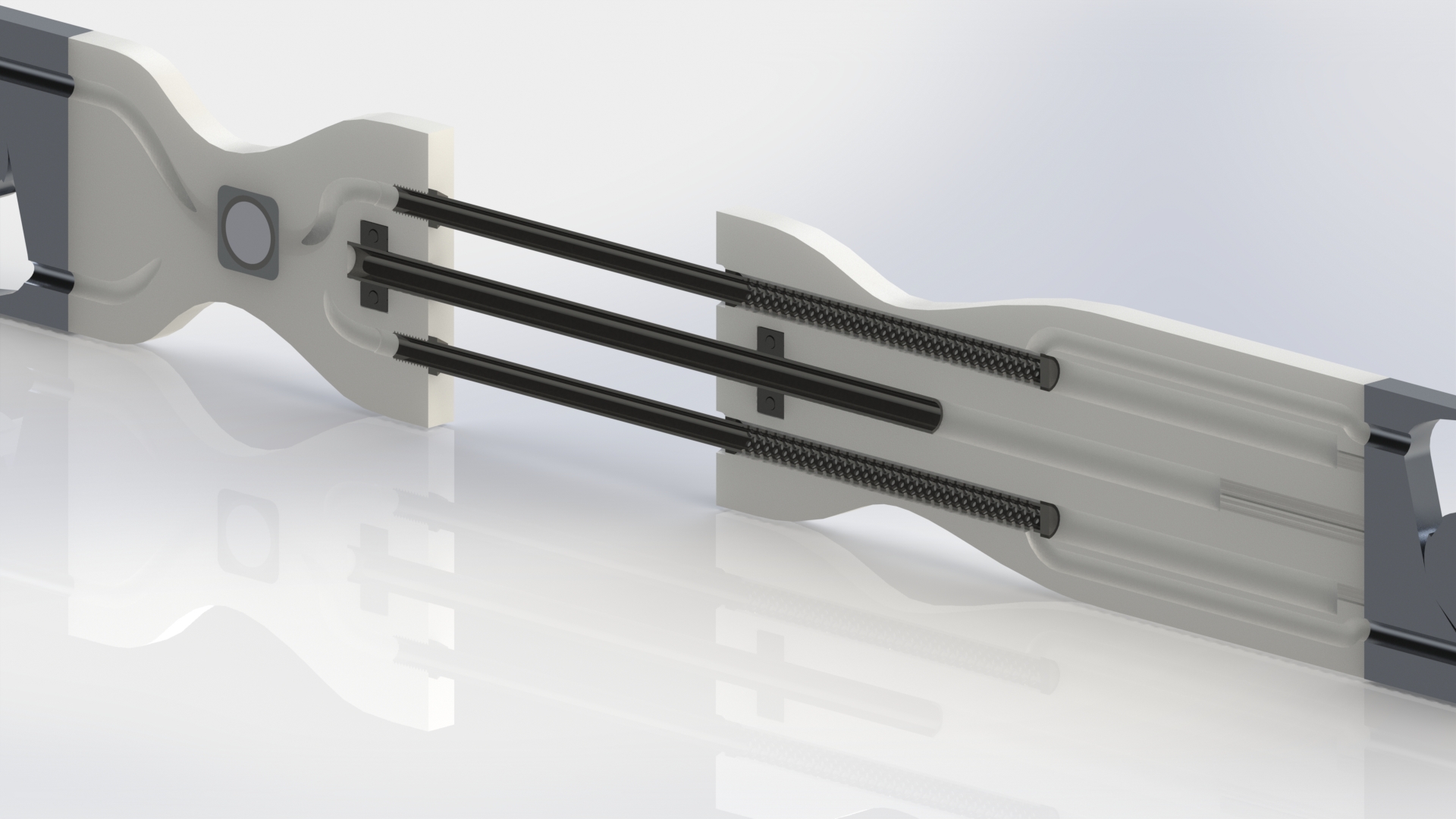
TCERA (Tunable Compliance Energy Return Actuator) is a robotic emulation platform of a human femur-tibia system. The intention behind TCERA is to capture the energy-efficient passive tendon system of the human leg. Traditionally, robotic actuation consists of a motor attached at the joint of two rigid members. This results in a walking cycle in which energy is spent in all phases of the gait. Humans, on the other hand, use the kinetic energy of the swing phase to store potential energy in the spring-like tendon system of our legs, which is released again as kinetic energy in the proceeding cycle. One of the core features to allow such high efficiency is the ability of mammals to alter the torsional stiffness about the knee in order to optimize energy use and return.
TCERA aims to recreate this process using antagonistically parallel springs to both alter the torsional stiffness and the equilibrium angle of the joint. One motor symmetrically drives the insertion points of the springs axially away from the knee axis in order to alter the stiffness, while the other motor drives the spring-bar housing in order to alter the geometry of the spring system's static equilibrium, which in turn determines the femur-tibia angle
V. Webster, R. Leibach, A. Hunt, R. Bachmann and R. D. Quinn, "Design and Control of a Tunable Compliance," in Living Machines, Milan, 2014
R. Leibach, V. Webster, R. Bachmann and R. D. Quinn, "Mechanical Improvements to TCERA, a Tunable Compliant Energy Return Actuator" in Living Machines, Milan, 2015
ShowCASE Graduate Research Fair 2015 1st place award
Gantry
Keeping with the Natural History Museum's goal of rendering Cleveland as the mantis research capital of the world, labs at Case Western Reserve University are expanding their cockroach research to include mantises. The goal of this project was to create a two dimensional gantry on which would contain the necessary imaging equipment to study the 3D kinematics of a mantis' legs. Iterations of this project attempted to achieve this on cockroaches by forcing the subject to remain still while it attempted to traverse a low-friction or idle rotating surfaces using an oiled plate or spherical treadmill, respectively. However, the accuracy of the data is questionable due to the discrepancy between the insect's true motion and that of how it is observed on an artificial surface. The second stage of the gantry holds one standard webcam which tracks the mantis as it moves about the environment, while two high-speed cameras on either side capture video at a constant relative position to the subject. The feeds from the cameras can then be combined to interpolate stereoscopic 3D data of joint positions and angles of the subject.
"Exo"
The CWRU Biorobotics lab has teamed up with Cleveland's Louis Stokes VA Medical Center to create a power-assisted exoskeleton with passive hydraulic damping and knee-hip torque conversion. This system would prove to make everyday lower leg functions like walking, sitting, and standing much easier for veterans that have partial or no function in their lower legs. I was able to work on designs for a one-off 3D printable manifold for altering the damping constant and the coupling state of the hydraulic lines. The model shown below features easy adjustability for the patient's exact hip-knee length without affecting the fluid volume of the hydraulic system.